@gabrielsoudry Hello Gabriel,
We plan to release the new Bookworm-compatible EVOK, along with new OS images, by the end of February. However, if we encounter bugs during testing, this may extend until the end of March.
ZR
tag @martin_triska
@gabrielsoudry Hello Gabriel,
We plan to release the new Bookworm-compatible EVOK, along with new OS images, by the end of February. However, if we encounter bugs during testing, this may extend until the end of March.
ZR
tag @martin_triska
@juryn Zdravím Juryne,
bohužel propojení s KNX budete muset řešit pomocí převodníku. Ideálně použijte nějaký KNX <-> Ethernet/ModbusTCP s tím, že si (například) v MervisIDE následně namapujete Modbus tabulku onoho převodníku.
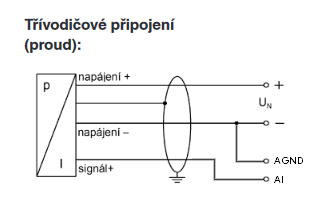
Zasílám po tel.rozhovor schéma zapojení AO ... obrázek je platný i pro Analogové výstupy.
@MirekV Zdravím, pošlete prosím c&p hw tree části config souboru a fotku DIP přepínačů.
ZR
@MirekV Zdravím, jak vypadá nastavení /etc/evok.conf ? Máte určitě správně nastavenou adresu? (nastavuje se pomocí DIP přepínačů)
ZR
@Martin-Randl Hello Martin,
have you been following this guide in order to connect sensor to 1-wire input?
ZR
Hello,
new tutorials have been published in our KB! Enjoy!
1. Variable Backup
2. Multiple controllers in the Solution
3. Data source
4. Sending emails
5. Multiple template pages (HMI/SCADA)
6. Communication attributes
Your feedback is greatly appreciated!
ZR
@Petr-Helebrant Hello Petr, this is strange, please contacts us via email ([email protected]), we will check this deeper.
ZR
@Petr-Helebrant Hello Petr,
most probably you have your storage as read only. Please try:
remount rw
remount rw
and after writing set it again as read-only
remount ro
/etc/fstab)remount rw -p*
@Gif2 Dobrý den,
produkt tohoto druhu (ošetření kapacitní zátěže připojených zařízení) zatím nemáme na plánu. Proto doporučejeme zapojit omezovač náběhových proudů anebo sekundární relé se zapojením RC členu před i za tímto relé.
Pozn.: Pokud zvolíte relé s cívkou na stejnosměrné napětí je nutné zvolit jiný ochranný prvek před tímto relé např. varistor, nebo diodu.